I design and build things for the virtual and real world.
Coding
During my education, I self-taught microcontroller and computer programming as a side skill. Since then, I've worked on different programming projects that involved robotics, automation, and design.
Research
During my university years, I participated in different developments at the Mechatronics Department. As a result, I authored and co-authored several research papers in robotics, system control, monitoring, and related topics.
Robotics
I got my BSc and MSc degrees in Mechatronics eng. because of my interest in robotics. To enrich my team management skills, I completed a Lean eng. and a Quality control eng. postgraduate training programs.
Projects
An overview of my projects (non-exhaustive list)
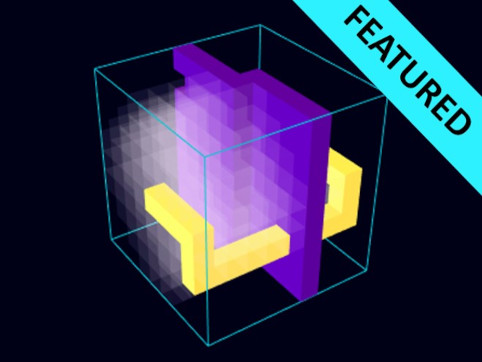
Online 3D Pathfinding Algorithm Visualization Tool
VS Code ThreeJS jQuery Bootstrap bootstrap-slider.js HTML CSS JavaScript
Send me an e-mail, check my projects on GitHub, or connect with me on LinkedIn
Zsolt Molnár
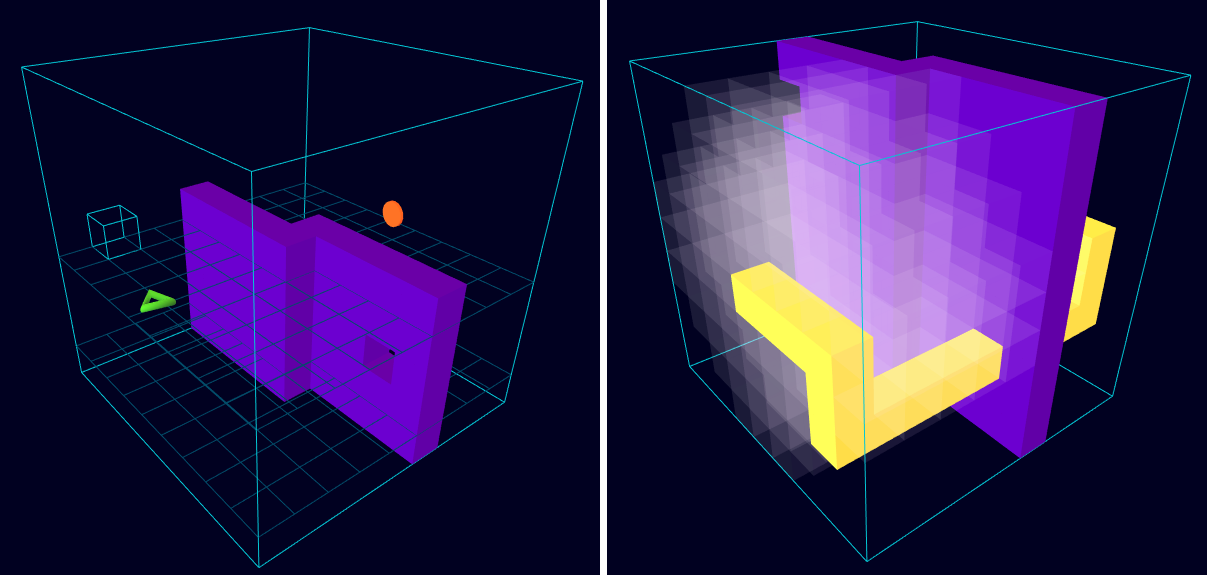
Online 3D Pathfinding Algorithm Visualization Tool
My goal with the project was to teach myself WebGL based graphics and related technologies. As a result, the application has an editable 3D environment, which permits the user to build his own obstacle course for pathfinding algorithms in a 3-dimensional space. The 3D editor enables moving the start and endpoints, adding/removing walls (obstacles), and resizing the 3D space available for the algorithm.
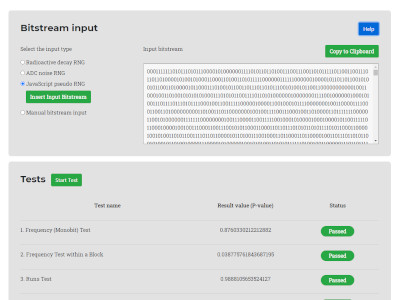
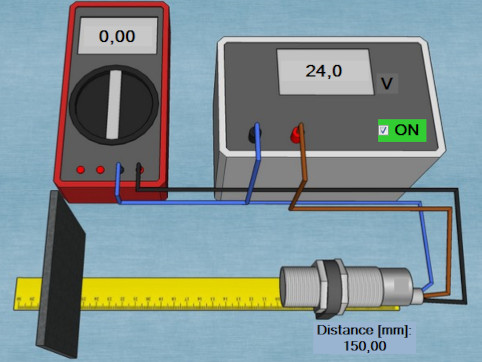
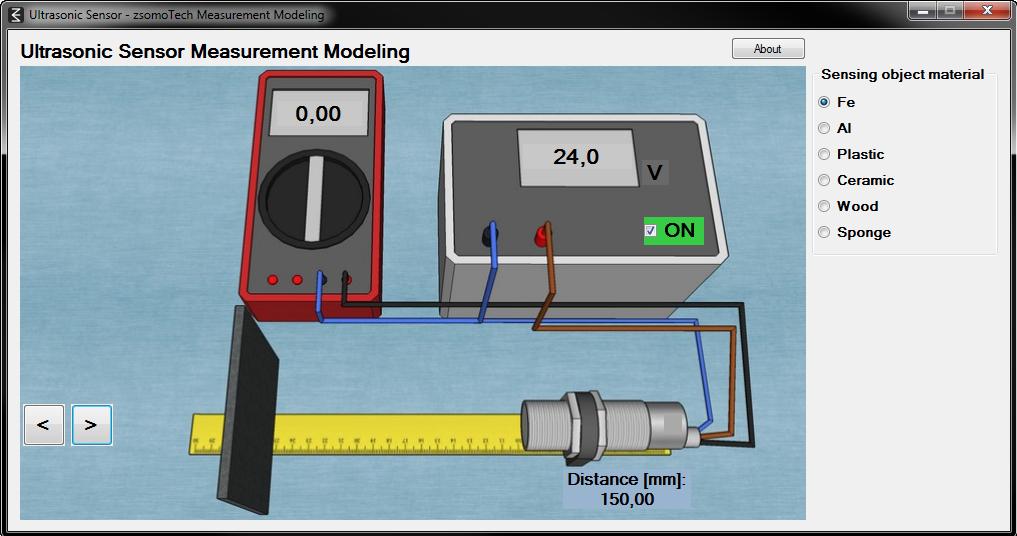
Because of the lockdown caused by COVID-19 outbreak, the university labs were closed, where the industrial sensor measurements were carried out. To overcome this challenge, I began to work on a set of .NET framework-based applications, which are intended to model the behavior of the real measurement setup. The output values are generated using actual measurement data with random noise generation. Each interface has an image of the measurement setup, which illustrates the physical arrangement of the devices.
A Pro Micro board based, 3D printed, triple-layout macro keyboard with mechanical switches (Arduino IDE programmable). The Pro Micro board emulates an HID device which grants cross-platform and cross-device compatibility without requiring additional software.
Technologies: Arduino IDE FreeCAD Autodesk EAGLE C++
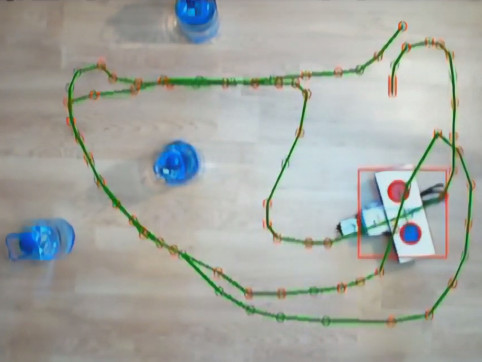
The project's goal was to control a robot based on a top view of the area and a hand-drawn path. The functionality was accomplished by processing the top view image using EmguCV, a .Net wrapper for the OpenCV library. The algorithm detects the red-blue tracker circles and determines the robot position in real-time. The steering is determined using geometry calculations. For demonstration, a LEGO NXT robot was used, connected via Bluetooth to the computer.
Technologies: Visual Studio IDE OpenCV EmguCV C#
Competition in Applied Engineering
2010 - 2014
~ 2010 ~
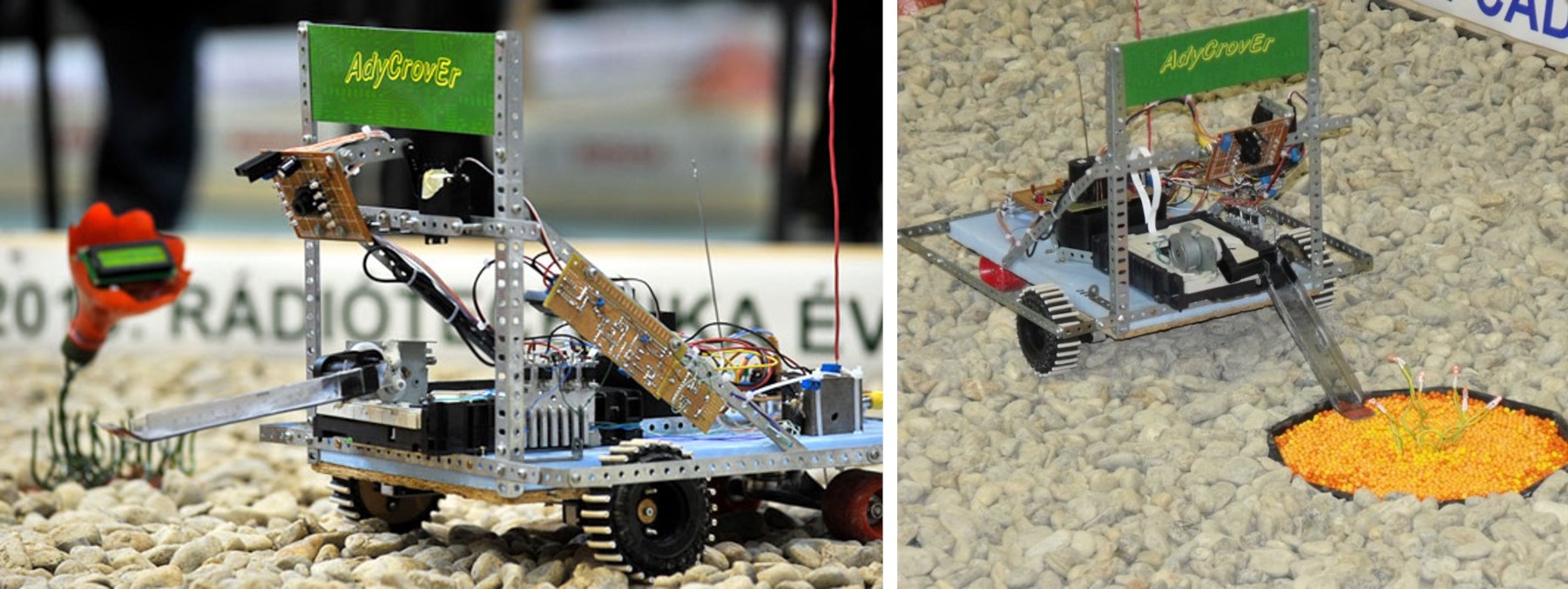
This was the most complex mission from the five consecutive years. The mission had multiple challenges. First, the robot (in this year called a Mars rover) needed to navigate a rugged terrain made up of river pebbles. The contest area was entirely hidden from the competitors, only a low-resolution satellite (top-view webcam) image was available, and the video stream from the rover mounted camera. The manual commands were delayed by 15 seconds. Only one team was present on the field at a given time, having 30 minutes to complete the mission.
The rover had to read a DNA sequence from a strange, flower-disguised screen with its onboard camera in the first part. In 2010 the today's smartphones were less capable, and even the basic models were expensive. For this reason, an analog black and white camera was used, connected to a TV transmitter on the robot. An analog TV set received the signal.
In the second part of the mission, the rover had to take a soil sample (represented by airsoft bullets for simplicity) from an alien plant's ground. The rover was equipped with a shovel mechanism, built from repurposed CD drive units and printer parts.
In the third part of the mission, the soil sample had to be transported to a space elevator, represented in the competition by a metal pipe climber.
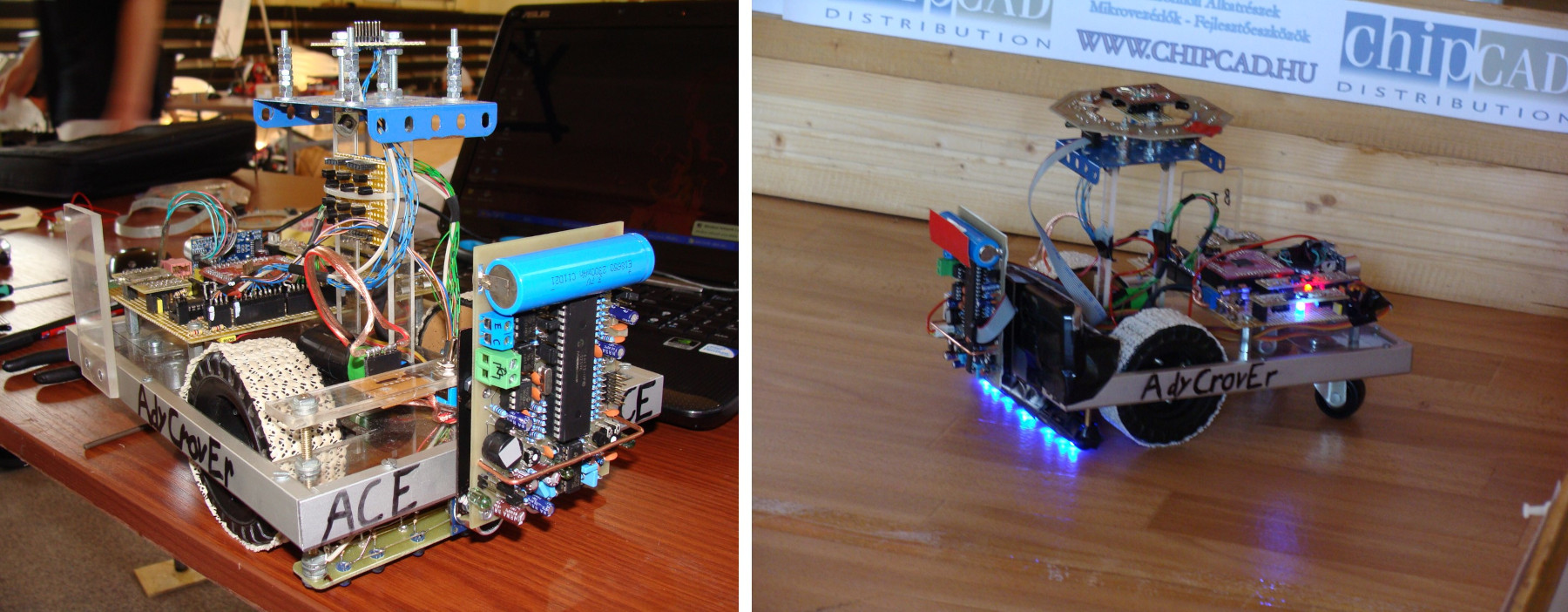
From the five consecutive competitions, this was the most complex one from a technical perspective. For autonomous control, a top-view of the field was available via a live video stream. At the same time, the area was divided into different "worlds." To move between them, stargates were placed on the field. These gates contained infrared transmitters with different but known frequencies. Also, a line following option was available for the robot when it was nearby the gate. There were pyramids with varying values of score in each world, which could be collected by visiting them with the robot. The pyramids also were equipped with IR transmitters of a specific frequency.
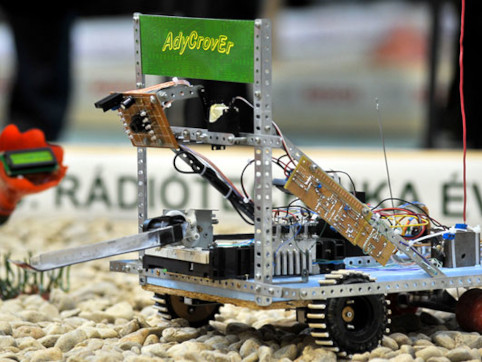
The robot on the figure was equipped with all the necessary sensors for autonomy and the power of processing required for frequency analysis and line following by using a Microchip PIC32, nearly the fastest microcontroller available on the market at that time. The manual commands were delayed by 15 seconds.
This year's competition aimed to design a spider-like robot that positions ping-pong balls (representing spider eggs) on stepped platforms. The robot on the figure used Klann linkage to achieve the walking motion of its two times four legs, each group of four driven by a motor. The robot competed against 3 other teams present on the field at the same time.
For manual commands, a 15-second delay was necessary. From the control perspective, and a basic version of autonomous control based on image processing was implemented. This was perfected for the 2013 competition.
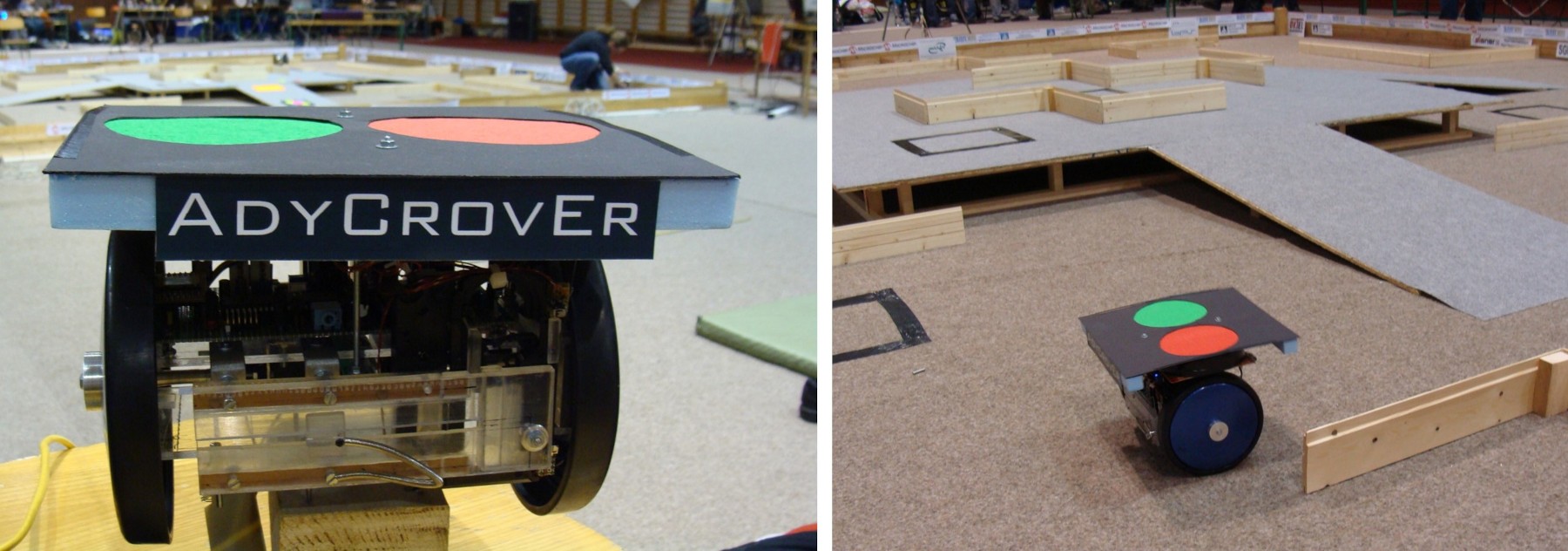
The goal of the competition was to place magnetic rods on marked spots. The story said that the robot was situated on a distant planet, so all the manual commands were delayed by 10 seconds. Any automatic control-related decision could be executed by the robot instantly. There was a webcam over the field, which provided a live video stream for control purposes. Another challenge was that the robot must have only two wheels, which introduced an imbalance in the system.
The robot on the figure had full autonomy, except the path planning at the beginning of the rounds, which had to be done manually. With all of these, the robot had to compete against three other teams present on the field at the same time.
The competition's goal was to place dices on different height boxes, competing against three other teams present on the field at the same time. The vehicle needed to be a hovercraft-locomotion based one. The hovercraft was hand-controlled, using a glove mounted accelerometer. In this year, the manual commands were not delayed.
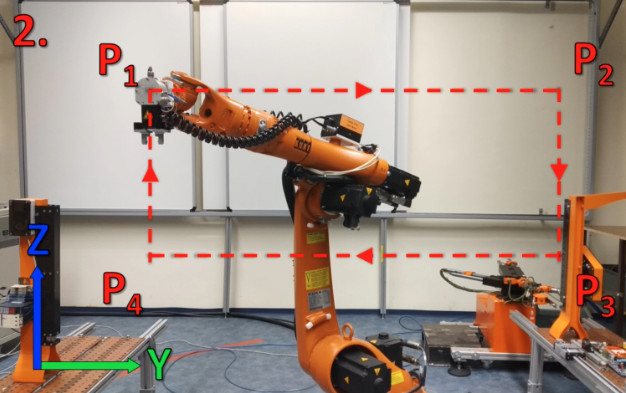
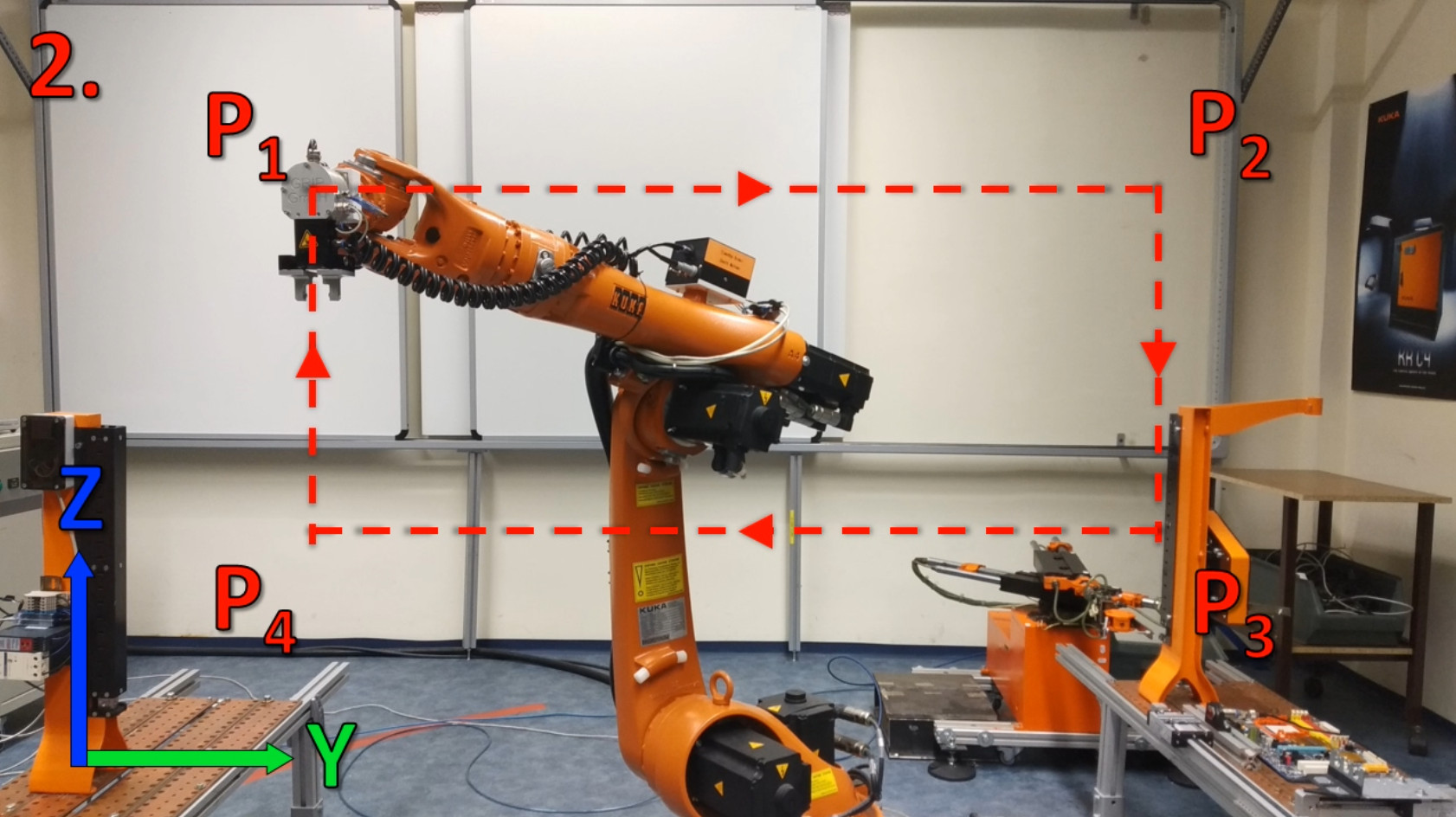
Real-time accuracy monitoring system for industrial robot arms
The core of the system is a software developed in the lab, which compares the robot's preprogrammed paths with the momentary one. As a result, we get an absolute difference, which then is compared against a reference value. The reference value is the threshold for different warning levels.
The paper was presented at the Annual Session of Scientific Papers - IMT Oradea 2019 international conference.
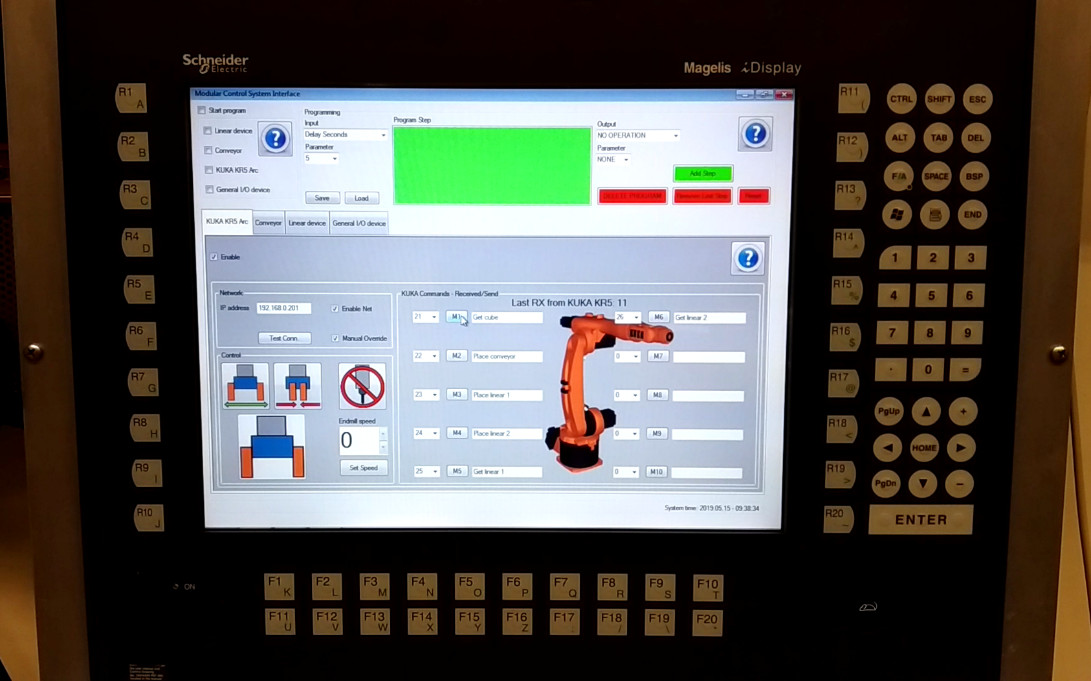
Flexible control and monitoring system design initiative based on Industry 4.0 principles
The UI running on a touchscreen-enabled HMI
The four different control module
System demo
Programming demo
The project is a design initiative, which outlines the main requirements for a flexible and modular control system design from software and hardware perspectives. At the same time, the basics of Industry 4.0 are taken into account. As a result, the system prototype was built and tested by the creators and Mechatronics Engineer students as part of their classes. The system includes a UI and control logic, which runs on a touchscreen-enabled HMI. The hardware part consists of four different purpose Wi-Fi enabled control module.
The paper was presented at the 3rd International Symposium on Small-scale Intelligent Manufacturing Systems (SIMS 2020) international conference.
The conference presentation topic was a network-connected control system developed at the Department of Mechatronics. With wireless technology, the devices (production cell components) equipped with the in-house developed control modules can connect to a central computer. With a touch-enabled HMI, the users can redefine the connections and behavior of the controlled devices. The wireless connectivity is an essential feature for the Laboratory because it permits the production cell's reconfiguration fast and easy between educational and research activities.
The development was presented at the Process Control System 2019 (PCS 2019) international conference.
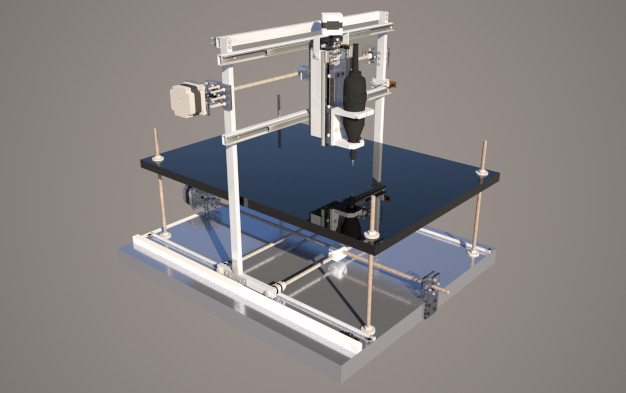
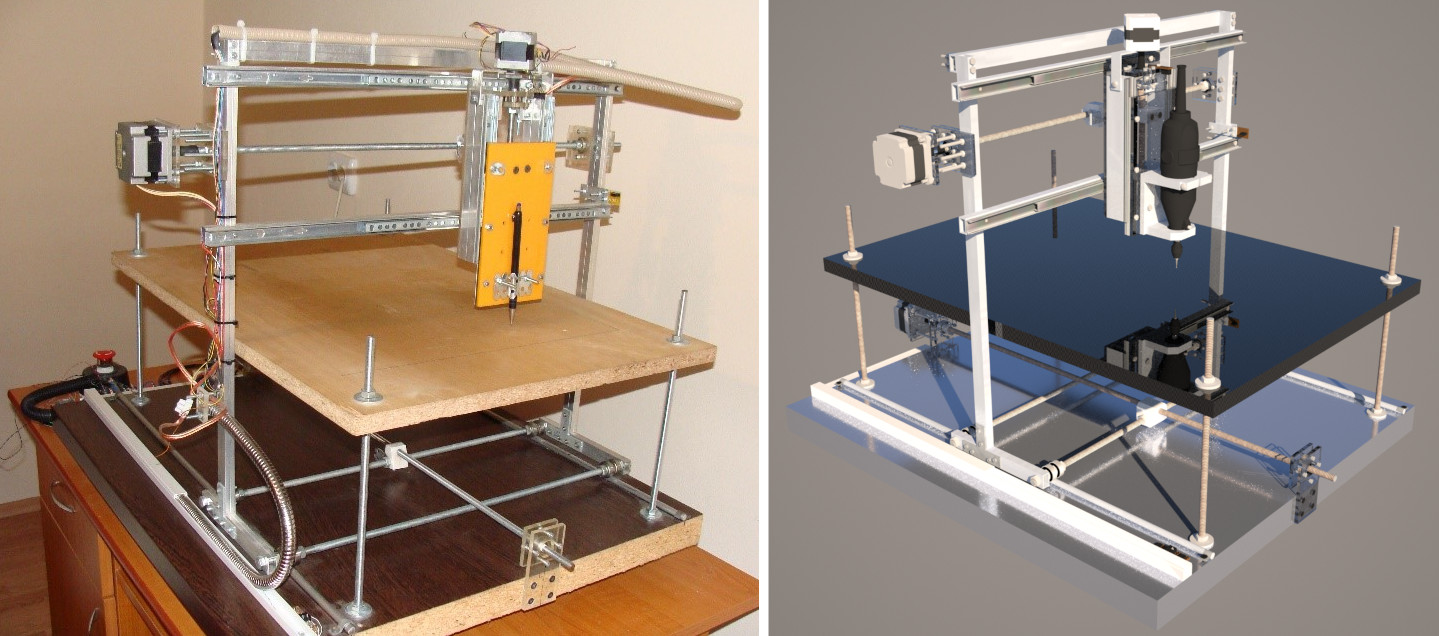
Remote controlled and monitored CNC developed for prototype component manufacturing
The development's main challenge was that we needed to design the CNC using components mostly available in a bigger hardware store. Also, the CNC frame must be sturdy enough to execute smaller machining jobs. The second challenging part was the design of the control system. This was based on a Raspberry Pi single-board computer and an Arduino board as a G-code interpreter and physical I/O interface.
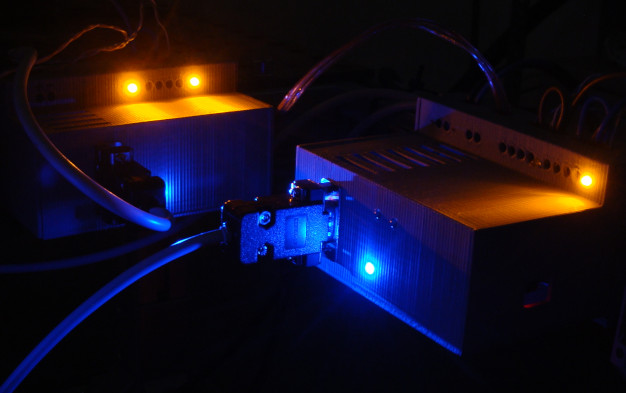
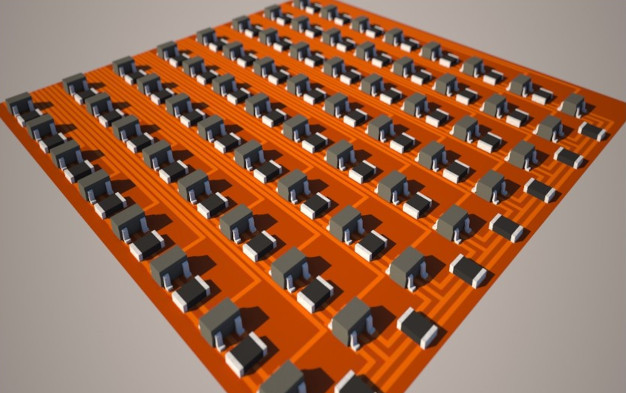
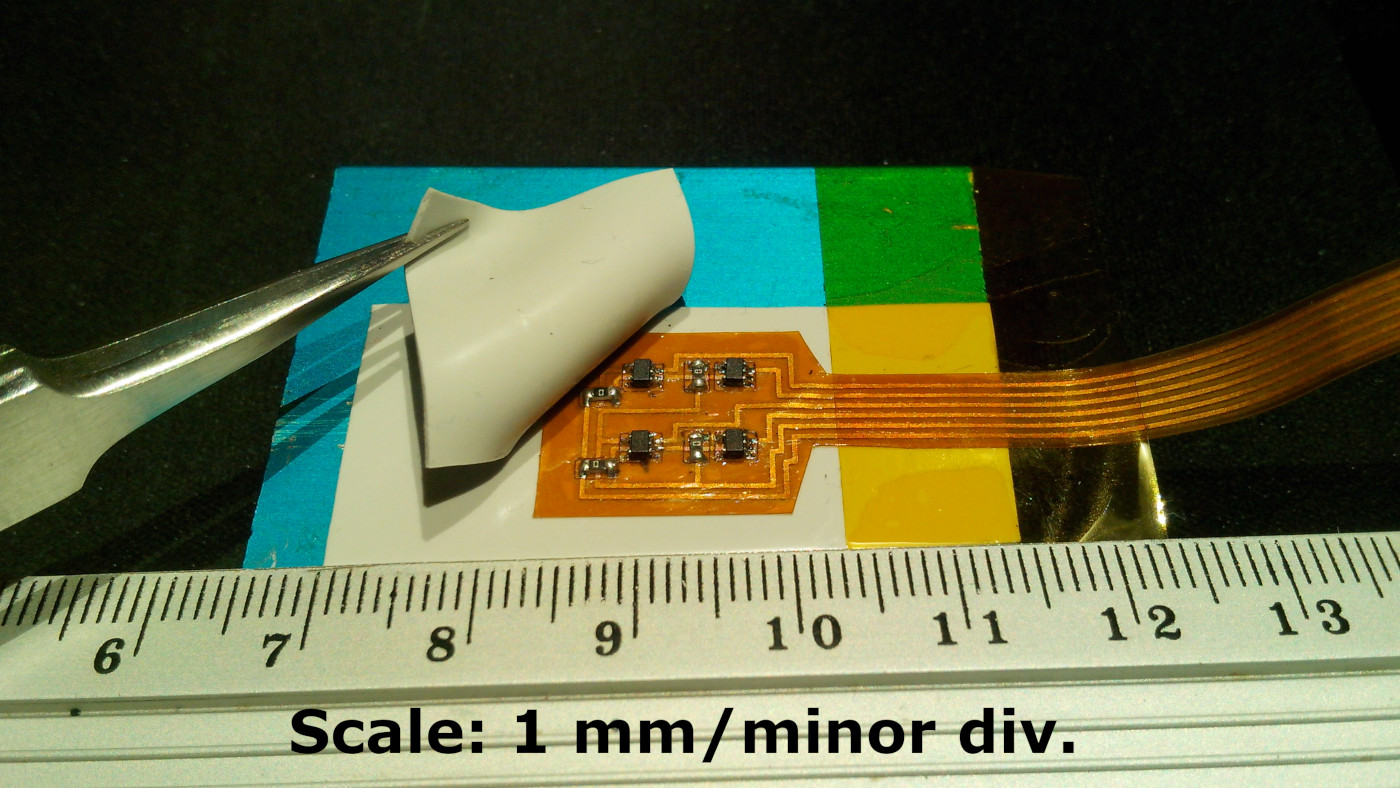
Heat-sensitive electric skin based on predictive temperature measurement
The goal was to create a skin-like surface with similar heat-sensing capabilities as a human skin. Thereby it can distinguish the tangible temperature objects from hot ones. We achieved this functionality by applying the predictive temperature measurement principle to off the shelf, low heat capacity, and cheap temperature sensors mounted on a flexible PCB. The prototype was a 2 x 2 sensor matrix. The resulted concept can be applied to humanoid robot arms, prosthetic arms, and other fields where robot-human interactions happen.
The development was presented at the InterTalent Unideb 2016 international conference.